Галерея цитат
Всякая вещь является благом, только когда она полезна для достижения счастья.
Аль-Фараби
Новости факультетов
Ассамблея читать далее
16 апреля 2026 года на факультете истории, экономики и права, в рамках декады науки состоялась торжественная церемония оснащения сертифицированного це читать далее
10 апреля 2026г на факультете истории, экономики и права прошла Секция 7-«Правовые и социально-экономические аспекты развития общества в условиях глоб читать далее
Гранты читать далее
В Северо-Казахстанском университете им. М. Козыбаева состоялась Международная научно-практическая конференция «Козыбаевские чтения – 2026», посвящённа читать далее
8 апреля 2026 года образовательные программы, разработанные Академией Международного финансового центра «Астана», были официально переданы в СКУ им. М читать далее
7 апреля 2026 года медицинский факультет НАО «Северо-Казахстанский университет им.М. Козыбаева» в рамках празднования Международного дня здоровья о читать далее
4 апреля 2026 года профессорско-преподавательский состав факультета истории, экономики и права принял участие в общегородском субботнике. В ходе мероп читать далее
Студенты факультета «Истории, экономики и право» группы Ио-25к(ІР) достойно представили наш Университет на Республиканском конкурсе макетов «Ботай – к читать далее
Разработка оптимальной по энергопотреблению бортовой системы управления автономным необитаемым подводным аппаратом
Приоритетное направление: Национальная безопасность и оборона

Руководитель проекта: Герасимова Ю.В., к.т.н.
Исполнители проекта: Герасимова Ю.В., к.т.н., Ивель В.П., д.т.н., Авдеев В.Н., к.т.н., Молдахметов С.С., магистр технических наук, докторант PhD, Петров П.А., магистр технических наук, докторант PhD.
Сроки исполнения: 2019-2021 гг.
Объем финансирования: 105 000 000 тенге.
Цель проекта: Разработка системы управления автономным необитаемым подводным аппаратом, как носителя оборудования специального назначения, обеспечивающей высокую точность при его перемещении и позиционировании на заданной глубине в условиях внешних помех со стороны окружающей среды, минимизацию энергозатрат и увеличение длительности автономного плавания.
Ожидаемые результаты: Разработка компьютерного моделирующего комплекса-стенда, предназначенного для исследования режимов работы системы управления АНПА, ее отладки и диагностики в реальном режиме времени, позволит сократить сроки и стоимость разработки современных подводных робототехнических комплексов, предназначенных для военных целей. Получение патента на полезную модель.
Описание проекта: За последние годы в различных странах, занимающих ведущее положение в области морских технологий, было создано значительное число автономных необитаемых подводных аппаратов (АНПА) для решения широкого круга научных и прикладных задач в морских акваториях.
Назрела необходимость в развитии и внедрении технологий разработки и создания подводной робототехники и в Республике Казахстан.
Задачи проекта:
−применение параметрического идентификатора нелинейных гидродинамических параметров АНПА с целью оптимизации процессов управления;
−разработка двухпроцессорной бортовой системы управления на основе 32-х разрядных ARM-процессоров для реализации алгоритмов параллельной обработки сигналов;
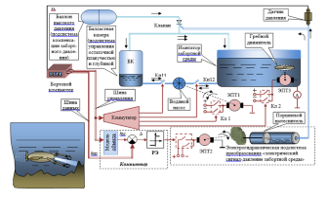
−разработка аппаратно-программного стенда, позволяющего проводить полунатурные испытания системы управления, включая датчики и комплекс электромеханических, гидравлических и пневматических исполнительных механизмов.