On March 14, 2026, the Faculty of History, Economics, and Law hosted a festive event dedicated to the traditional Kazakh holiday «Kөrisu kuni», also k Read more
Quotation gallery
Men learn while they teach.
Lucius A. Seneca
Faculty News
On the eve of the celebration of Gratitude Day, on February 27, 2026, a charity fair was held at the Faculty of History, Economics and Law, bringing t Read more
On February 27, 2026, in anticipation of the «celebration of Gratitude Day», the Faculty of History, Economics, and Law hosted a warm gathering and a Read more
On February 27, 2026, the Faculty of History, Economics and Law held a career guidance meeting with students of the «Foundation» program and future ap Read more
27 февраля 2026 года студенты 7 курса под руководством куратора М. Мурзабаевой в рамках мероприятий, приуроченных к празднованию Дня благодарности, по Read more
24 февраля 2026 года на базе Северо-Казахстанский высший медицинский колледж имени Жұмағали Тлеулина КГУ «УЗ акимата СКО» прошла областная олимпиада п Read more
25.02.2026 на базе медицинского факультета состоялась лекция на тему «Посмертное донорство в Казахстане: выбор, который спасает жизни», организованная Read more
On February 19, 2026, students of the Faculty of History, Economics, and Law actively participated in the large-scale action «Nashakorlykka Zhol Zhok! Read more
On February 19, 2026, the Faculty of History, Economics, and Law held an explanation of the draft new Constitution of the Republic of Kazakhstan. The Read more
19 февраля 2026 года студенты 4 и 7 курсов медицинского факультета провели благотворительную акцию и посетили Дом ребёнка в г. Петропавловске. Инициат Read more
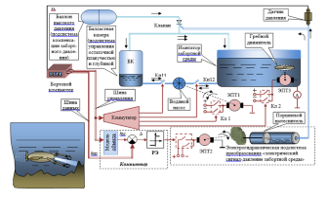
Development of an on-board control system of an autonomous unmanned underwater vehicle, optimal in terms of energy consumption
Priority area: National security and defense

Project manager: Gerasimova Yu.V., Ph.D.
Project executors: Gerasimova Yu.V., Ph.D., Ivel V.P., Ph.D., Avdeev V.N., Ph.D., Moldakhmetov S.S., Master of Technical sciences, doctoral candidate PhD, Petrov P.A., master of technical sciences, doctoral candidate PhD.
Terms of execution: 2019-2021
Amount of financing: 105,000,000 tenge.
Project goal: Development of a control system for an autonomous unmanned underwater vehicle, as a carrier of special-purpose equipment, ensuring high accuracy when moving and positioning it at a given depth in conditions of external interference from the environment, minimizing energy costs and increasing the duration of autonomous navigation.
Expected results: Development of a computer simulating complex-stand designed to study the operating modes of the AUV control system, its debugging and diagnostics in real time, will reduce the time and cost of developing modern underwater robotic systems intended for military purposes. Obtaining a patent for a utility model.
Description of the project: In recent years, a significant number of autonomous unmanned underwater vehicles (AUVs) have been created in various countries holding a leading position in the field of marine technology to solve a wide range of scientific and applied problems in marine areas.
There is a need for the development and implementation of technologies for the development and creation of underwater robotics in the Republic of Kazakhstan.
Project objectives:
−application of the parametric identifier of nonlinear hydrodynamic parameters of the AUV in order to optimize control processes;
−development of a dual-processor on-board control system based on 32-bit ARM processors for the implementation of algorithms for parallel signal processing;
−development of a hardware and software bench that allows for semi-natural tests of the control system, including sensors and a complex of electromechanical, hydraulic and pneumatic actuators.